Artykuły

Projekt dwuosiowego trackera solarnego na pływającej instalacji fotowoltaicznej

Wprowadzenie
Od pokoleń żyjemy w świecie bezprecedensowego wzrostu gospodarczego opartego o paliwa kopalne. Zapotrzebowanie na energię elektryczną gwałtownie rośnie przy zastraszającym tempie zużycia węgla i gazu ziemnego. W 2022 r. węgiel stanowił około 35,8% światowego miksu energetycznego, a gaz ziemny miał 22% udziału [1]. Jednak zasoby paliw kopalnych stopniowo się wyczerpują, a ich wykorzystanie powoduje globalny wzrost temperatury na skutek emisji gazów cieplarnianych. Dlatego też coraz częściej węgiel i gaz wypierane są przez dużo bardziej przyjazną środowisku alternatywę, czyli odnawialne źródła energii. Zrównoważony rozwój, powszechna dostępność oraz nieskomplikowana budowa sprawiają, że najbardziej popularna wśród nich energia słoneczna jest najlepszym wyborem, aby zaspokoić nasze rosnące zapotrzebowanie na energię elektryczną. Jest ona wszakże powszechnie dostępna i całkowicie bezpłatna. Panele fotowoltaiczne przetwarzają światło słoneczne na energię elektryczną nie emitując dwutlenku węgla, są bezobsługowe i nie generują hałasu. Ilość wyprodukowanej energii elektrycznej jest wprost proporcjonalna do natężenia światła słonecznego docierającego do modułu fotowoltaicznego oraz kąta pomiędzy padającym światłem słonecznym, a jego powierzchnią. Maksymalna moc elektryczna jest uzyskiwana pod optymalnym kątem, czyli gdy światło słoneczne i moduł fotowoltaiczny są ustawione prostopadle do siebie. Pozycja słońca zmienia się w ciągu całego dnia, sprawiając, że światło słoneczne i moduł zainstalowany przez większość dnia nie są do siebie prostopadłe, co ma wpływ na wydajność instalacji.
Aby zoptymalizować produkcję energii przez instalację fotowoltaiczną, wykorzystuje się system śledzenia promieniowania słonecznego, dzięki czemu powierzchnia modułu fotowoltaicznego jest przez cały dzień prostopadła do padającego światła słonecznego. Tracker jednoosiowy obracający się wokół jednej osi (zazwyczaj ze wschodu na zachód) potrafi zwiększyć dzienny uzysk do około 20% w porównaniu do analogicznej instalacji stacjonarnej, podczas gdy w przypadku trackera dwuosiowego, który obraca panele słoneczne zarówno wokół osi poziomej jak i pionowej, produkcja jest wyższa o około 33% od analogicznej instalacji stacjonarnej [2].
W związku z dążeniem inwestorów do optymalizacji produkowanej energii elektrycznej, zwłaszcza w tzw. szczytach porannym i popołudniowym, kiedy energia elektryczna jest najdroższa w trakcie doby, trackery z każdym rokiem zyskują na popularności i choć nie są jeszcze tak powszechnym zjawiskiem jak klasyczne instalacje stacjonarne, nie można o nich powiedzieć, że to nowość.
Jednakże ilość gruntów, które nie mogą być użytkowo wykorzystane na potrzeby rolnictwa czy budownictwa, jest ograniczona. Stąd podejmowane są starania, aby rozwijać energetykę słoneczną bez konieczności konkurowania z innym przeznaczeniem dostępnej powierzchni. Dlatego też coraz prężniej rozwijają się m.in. pływające instalacje fotowoltaiczne (ang. floating photovoltaics). Pojawia się więc pytanie czy rozwiązanie optymalizujące produkcję energii, które sprawdza się na gruncie, można zaimplementować na wodzie.
W artykule przedstawiono projekt rozwojowy wykorzystania dwuosiowego trackera solarnego umieszczonego na pływaku, porównując ilość generowanego przez tę instalację napięcia oraz porównano wartość z analogiczną, nieruchomą instalacją pływającą skierowaną w kierunku południowym pod kątem 11 stopni.
Charakterystyka zestawu
Poniżej przedstawiono listę najważniejszych komponentów wykorzystanych w projekcie:
- Model instalacji fotowoltaicznej oparty na platformie Arduino.
- Płytka rozwojowa Arduino UNO.
Płytka rozwojowa Arduino UNO z mikrokontrolerem ATMEGA328P-AU jest mózgiem całego trackera. Pozwala na zaprogramowanie działania całego systemu i sterowanie nim. Posiada 14 cyfrowych pinów wejścia/wyjścia (z czego 6 można wykorzystać jako wyjścia PWM), 6 wejść analogowych, rezonator kwarcowy 16 MHz, złącze USB, gniazdo zasilania, 1 programator ICSP i przycisk resetowania.
- Fotorezystory.
Cztery fotorezystory (czujniki światła) zainstalowane po jednym na każdej ze stron świata. Są to czujniki do wykrywania światła i zmian jego natężenia. Moduł fotorezystora służy do sygnalizacji obecności lub braku światła.
- Czujnik natężenia światła BH1750.
Czujnik przetwarzający natężenie światła o długości z zakresu od 320 nm do 560 nm na mierzalną (poprzez zastosowanie mikrokontrolera) proporcjonalną częstotliwość. Czujnik składa się z fotodiody, wzmacniacza operacyjnego, przetwornika ADC, rezonatora kwarcowego. Fotodioda przekształca wejściowy sygnał optyczny na sygnał elektryczny poprzez efekt fotowoltaiczny. Po wzmocnieniu przez obwód wzmacniacza operacyjnego napięcie jest zbierane przez przetwornik ADC, a następnie przetwarzane na 16-bitową liczbę binarną przez obwód logiczny i zapisywane w wewnętrznym rejestrze. Im silniejsze światło, tym większe natężenie i napięcie, dlatego natężenie światła można ocenić na podstawie wartości napięcia. Dzięki jego zastosowaniu znana będzie wartość natężenia światła otoczenia wyrażona w luksach [3].
- Ogniwo fotowoltaiczne.
Ogniwo słoneczne o mocy 1,5 W. Wymiary płytki, która przekształca energię słoneczną w energię elektryczną to: 135 x 85 mm.
- Czujnik temperatury i wilgotności DHT11.
Moduł z czujnikiem temperatury i wilgotności powietrza. Zakres pomiarowy:
- temperatura od 0 °C do 50 °C,
- wilgotność od 20 % do 90 % RH.
- Moduł z ładowarką solarną.
Ładowarka do akumulatorów Li-Ion zasilana z gniazda USB z możliwością podłączenia ogniwa słonecznego. Posiada układ automatycznie dostosowujący prąd dla osiągnięcia wyższej sprawności.
- Koszyk na akumulator 18650.
Koszyczek z przewodami mieszczący jeden akumulator typu 18650 3,7V Li-Ion.
- Wyświetlacz LCD.
Alfanumeryczny wyświetlacz LCD 2x16 znaków ze złączami prezentujący wartości w dwóch liniach, po 16 znaków w każdej. Zasilany napięciem 5 V.
- Moduł z buzzerem pasywnym.
Moduł buzzera z generatorem umożliwiający tworzenie sygnałów dźwiękowych przy pomocy sygnału napięciowego o określonej częstotliwości.
- Moduł z przyciskiem.
Umożliwia szybkie przesłanie sygnału o zaprogramowanym charakterze.
- Serwomechanizm.
Dwa silniki obrotowe (serwomechanizmy) obracające panel fotowoltaiczny. Składają się głównie z obudowy, płytki drukowanej, silnika bezrdzeniowego, przekładni i czujnika położenia. Ich zasada działania polega na tym, że serwo odbiera sygnał wysyłany przez mikrokontroler lub odbiornik i wytwarza sygnał odniesienia o okresie 20 ms i szerokości 1,5 ms, następnie porównuje uzyskane napięcie polaryzacji DC z napięciem potencjometru i uzyskuje różnicę napięcia na wyjściu [3].
- Miernik napięcia.
Miernik KWS-MX18L pozwalający na monitorowanie i diagnozowanie różnych parametrów związanych z portami USB. W projekcie za jego pomocą mierzone będzie generowane przez instalację napięcie.
- Konstrukcja układu.
Konstrukcja zbudowana z akrylowych płytek konstrukcyjnych oraz obudowa serwomechanzimu zbudowana z tworzywa sztucznego.
- Konstrukcja pływająca (pływak).
Wykonany z tworzywa sztucznego pływak do którego przymocowano system nadążny.

Rys. 1 Model trackera solarnego na pływającej instalacji fotowoltaicznej (wykonanie własne)
Wykonanie pomiarów
Zbudowany z powyższych podzespołów prototyp oraz nieruchomą instalację referencyjną skierowaną na południe przetestowano w dniu 01.01.2023 r. od godziny 08:00 do godziny 16:00 na sztucznym zbiorniku wodnym celem porównania ich pracy i uzyskiwanych wartości generowanego napięcia. Jednocześnie zbierano dane dotyczące wychwytywanego natężenia światła, co wyrażało wydajność instalacji. Bazując na danych naukowców z amerykańskiego Narodowego Laboratorium Energetyki Odnawialnej, mówiących, iż typowy kąt montażu pływających systemów fotowoltaicznych wynosi 11 stopni [4], zdecydowano się na taką wartość w przypadku instalacji referencyjnej. System nadążny poruszał panelem swobodnie w dwóch osiach, wybierając optymalny kąt nachylenia do kierunku padającego promieniowania słonecznego. Wyświetlacz LCD prezentował wartości temperatury, wilgotności oraz natężenia światła, natomiast miernik napięcia przyłączony do portu USB, wskazywał w czasie rzeczywistym generowane przez instalację fotowoltaiczną napięcie. Wartości te dla różnych czasów zarejestrowano w tabeli 1. Dane ujęte w tabelach wykorzystano do graficznego porównania pracy obu instalacji na rysunkach 2 i 3.
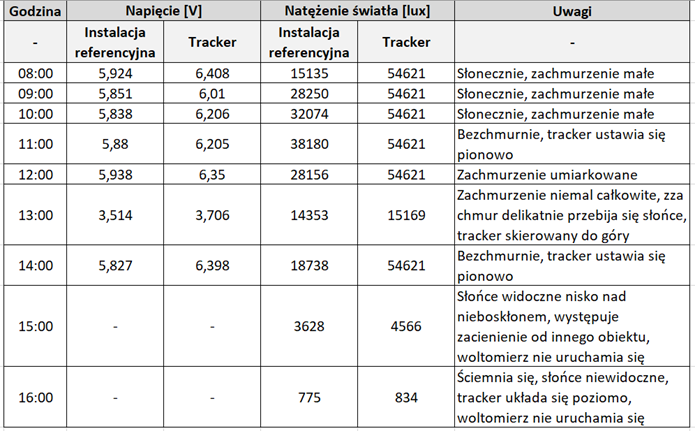
Tab. 1 Wyniki pomiarów wykonanych w trakcie badania (opracowanie własne)
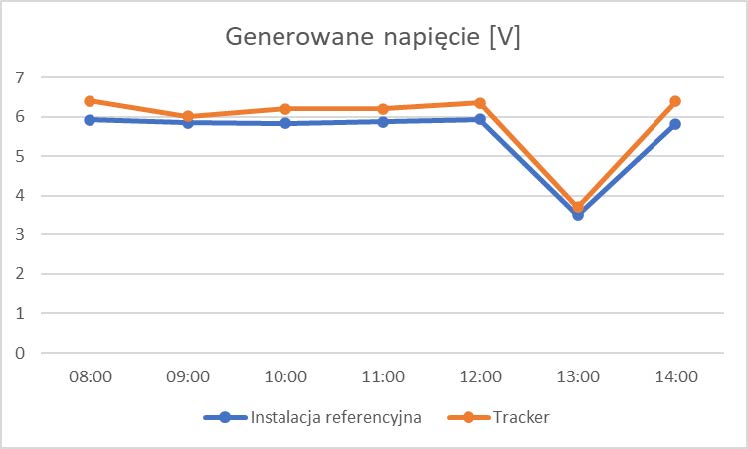
Rys. 2 Porównanie wartości napięcia generowanego przez dwie pływające instalacje fotowoltaiczne: statyczną oraz z systemem nadążnym (opracowanie własne)
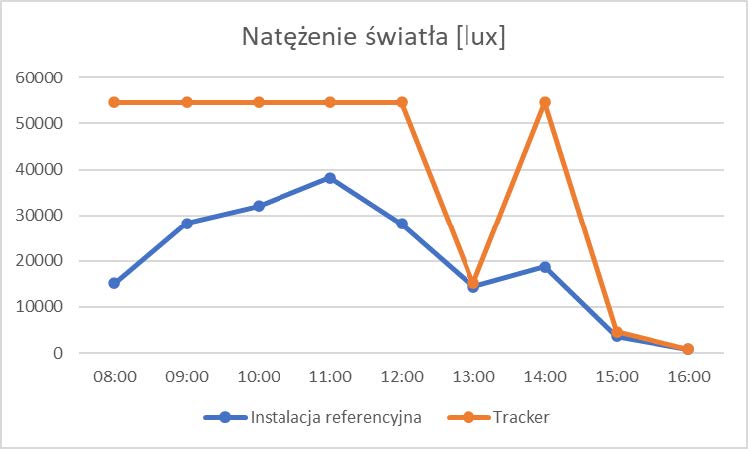
Rys. 3 Porównanie wartości natężenia światła wychwytywanego przez dwie pływające instalacje fotowoltaiczne: statyczną oraz z systemem nadążnym (opracowanie własne)
Wyniki badania
Prace przeprowadzono na sztucznym zbiorniku wodnym w dniu 01.01.2023 w trakcie 8 godzin. Wyniki pomiarów zestawiono w tabeli 1 oraz porównano je graficznie na rysunkach 2 i 3. Wybrany do badań dzień charakteryzował się wysokim nasłonecznieniem, aczkolwiek ok. godziny 13:00 nastąpiło zachmurzenie nieba, co wpłynęło na wyniki pomiarów i pokazało zaskakujący wniosek.
Zarówno w tabeli 1 oraz na rys. 2 widać, iż w przypadku instalacji stacjonarnej, wartość maksymalną generowanego napięcia (5,938 V) zarejestrowano o godzinie 12:00, a wartość minimalną o godzinie 13:00, w której wystąpiło niemal całkowite zachmurzenie nieba. Ta sama sytuacja miała miejsce w przypadku dwuosiowego systemu nadążnego, co również obrazuje rys. 2, gdzie osiągnął on maksymalną wartość napięcia (6,35 V) o godzinie 12:00. Wartość minimalną także zarejestrowano w tym samym czasie co w przypadku instalacji stacjonarnej, czyli o godzinie 13:00. Tak więc wydajność instalacji stacjonarnej i systemu nadążnego osiąga szczyt w południe, mimo że charakteryzują się one diametralnie innym kątem nachylenia modułu fotowoltaicznego. Zauważalne jest również, iż w każdym z pomiarów wartość napięcia na instalacji trackera jest wyższa niż w przypadku instalacji stacjonarnej. Z pewnością ma na to wpływ kąt nachylenia ogniwa, które w przypadku pory roku, w której wykonano pomiary oraz optymalizacji uzysku produkowanej energii, powinno przyjmować kąt niemal prostopadły do podłoża. Natomiast celem zobrazowania przewagi systemu nadążnego nad tradycyjną instalacją, warto zwrócić uwagę na rejestrowane na wyświetlaczu wartości natężenia światła. Niemal w każdym pomiarze różnica jest znacząca, osiągając średnią na poziomie 37,7%. Pokazuje to, że system nadążny to ważny czynnik mający wpływ na optymalizację pracy instalacji i zwiększenie rocznego uzysku w porównaniu do instalacji stacjonarnej. Oczywiście potencjalny uzysk energii z trackerów należy poddać korekcie, ponieważ potrzebują one zasilania do pracy systemu nadążnego, co w przypadku niniejszego badania stanowił akumulator 18650. Co jednak zaskoczyło, to niewielka różnica między oboma instalacjami w przypadku znaczącego zachmurzenia. Przewaga trackera wyniosła zaledwie 5,4%.
Podsumowanie
W artykule przedstawiono prototyp trackera fotowoltaicznego dla pływającej instalacji fotowoltaicznej opartego o platformę Arduino. Badano jego charakterystykę pracy porównując jednocześnie do stacjonarnej instalacji referencyjnej. W trakcie eksperymentu rejestrowano wartości generowanego napięcia oraz wartość natężenia światła, która wyrażała skuteczność jego wychwytywania przez instalacje w ciągu dnia. Porównanie uzyskanych wyników pokazuje, że dzięki zastosowaniu prototypowego rozwiązania śledzącego, uzyskiwane wartości wychwytywanego natężenia światła są wyższe średnio o 37,7% w stosunku do stacjonarnej instalacji referencyjnej. Wyniki te potwierdzają skuteczność urządzenia i możliwość jego stosowania na pływających instalacjach fotowoltaicznych zlokalizowanych np. na sztucznych zbiornikach lub jeziorach. Barierą rozwoju paradoksalnie może być atut z perspektywy uzysku energii, czyli dostosowywanie się do optymalnego kąta. Co do zasady, na zbiornikach wodnych warunki wietrzne są dobre, co z perspektywy działania trackera może być niekorzystne, gdyż powierzchnia modułu pod wysokim kątem przyjmuje funkcję żagla i może ulec zniszczeniu przez podmuchy wiatru. Warto więc docelowo powtórzyć badanie w naturalnej skali i jako alternatywę wypróbować jednoosiowy system nadążny.
- https://www.statista.com/statistics/269811/world-electricity-production-by-energy-source/
- Hassan Fathabadi: Novel high efficient offline sensorless dual-axis solar tracker for using in photovoltaic systems and solar concentrators
- KS0530 DIY Solar Tracking Kit For Arduino
- https://www.nrel.gov/state-local-tribal/blog/posts/stat-faqs-part1-floating-solar.html